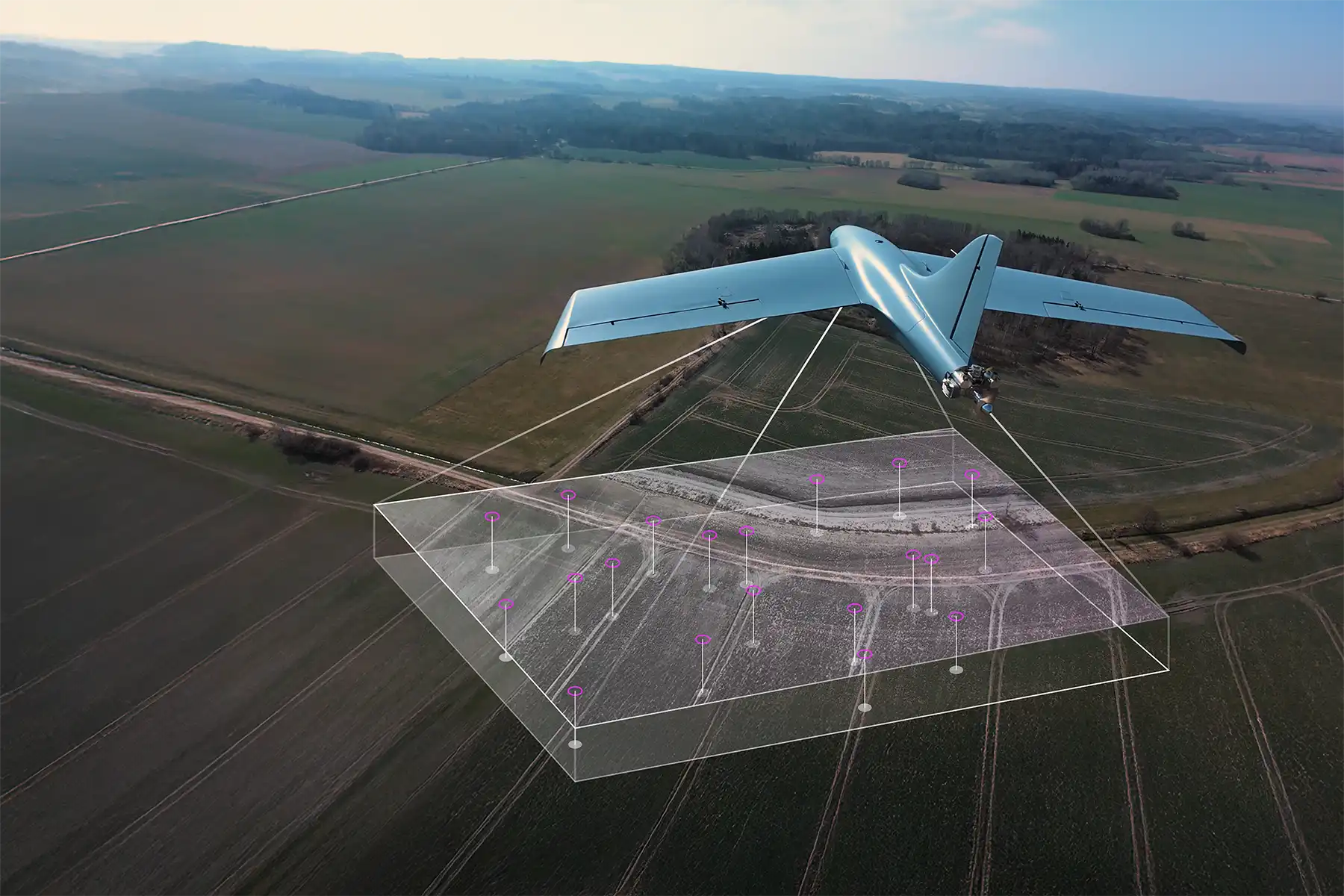
Visual Navigation system enables our MTS Unmanned Aerial Vehicle to accurately track its position in GNSS-denied and jammed environments. By integrating multiple sensor inputs, the system provides fully autonomous navigation without relying on external signals, making it a critical solution for mission continuity in contested areas.
Sensor data is processed by proprietary algorithms and transmitted to the LPP autopilot for autonomous drone navigation. In the final mission phase, the Visual Navigation system employs optical tracking for precise target recognition and terminal flight path adjustment.