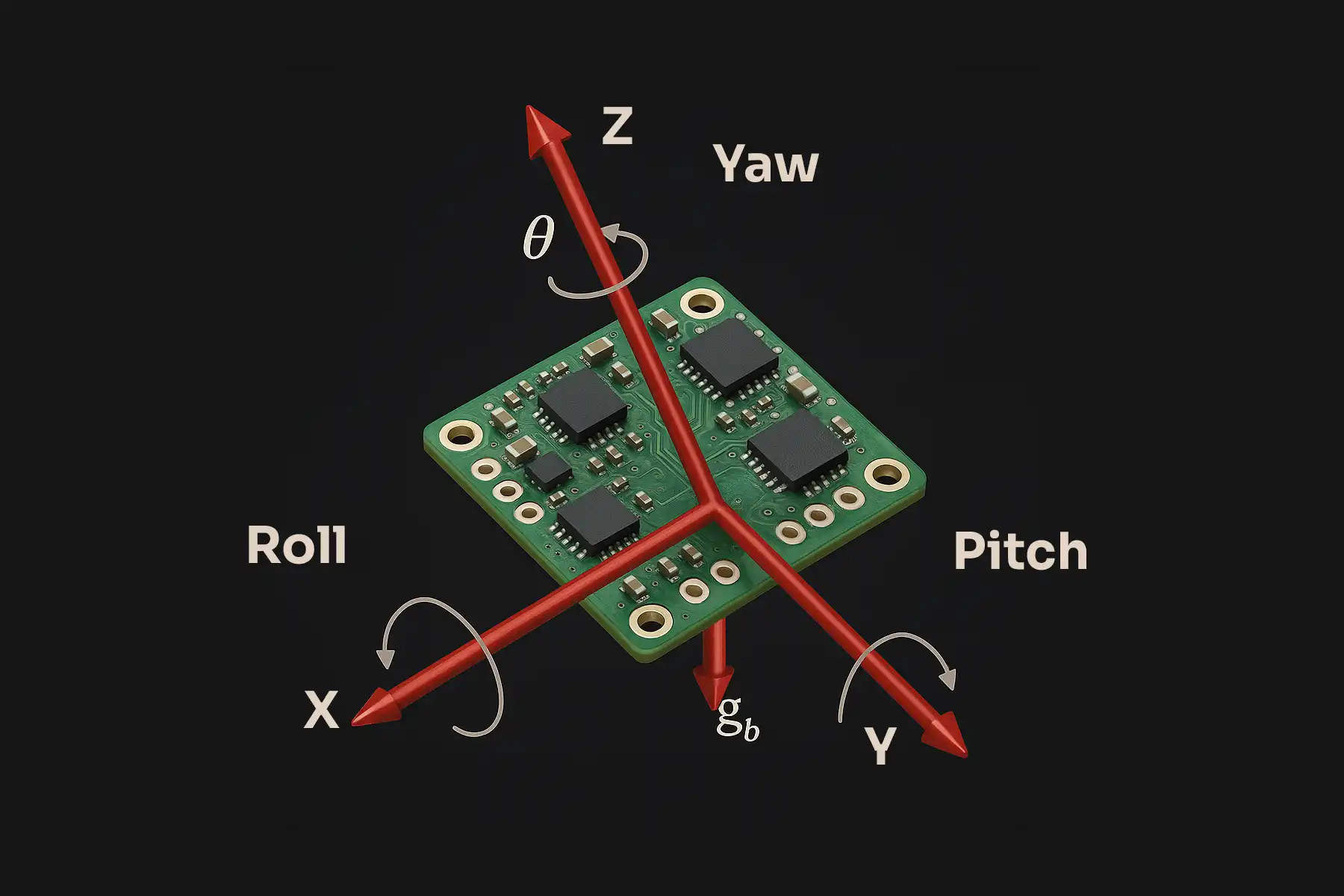
The Attitude and Heading Reference System (AHRS) determines position, orientation, and velocity in GPS-denied environments. It provides redundancy for both manned and unmanned platforms. AHRS operates as a stand-alone inertial unit for medium to large drones. Alternatively, it functions as an integrated component of the Electronic Standby Instrument System (ESIS), serving as an essential backup system for emergency situations.
The system processes data from gyroscopes, accelerometers, and a multi-system GNSS receiver. It utilises a 3-axis magnetometer and an air data system to continuously update position and orientation via Kalman filtering.
LPP also applies similar technology in its Inertial Navigation Unit for armoured vehicles and UGVs.